
Page 333 - Kỷ yếu hội thảo khoa học lần thứ 12 - Công nghệ thông tin và Ứng dụng trong các lĩnh vực (CITA 2023)
P. 333
Nguyễn Văn Thiện, Nguyễn Duy Nhật Viễn, Trần Thế Sơn, Dương Hữu Ái 317
Khoảng cách được tính từ các vector , :
= ( − ) + ( − )
(8)
= ( − ) + ( − )
Có ba khả năng xảy ra đối với và , đó là: < ; > và = .
( )
• Nếu < : vị trí hiện tại có khả năng xảy ra nhất là Rx ( , ).
( )
• Nếu > : vị trí hiện tại có khả năng xảy ra nhất là Rx ( , ).
• Nếu k 1 = k 2: cả hai đều có khả năng xảy ra như nhau. Khi đó, Rx sẽ không xác định
được chính xác vị trí hiện tại của mình. Đây được xem là nhược điểm của mô hình
đề xuất. Bài báo này khắc phục trường hợp này bằng cách dựa vào các vị trí trước
đó đã được lưu lại tại máy thu để dự đoán hướng đi có thể của đầu thu.
Khi vị trí Rx được xác định, khoảng cách d 3 và các phần tử bị khuyết ℎ , ℎ , ℎ
của ma trận H sẽ được khôi phục. Kết quả là dữ liệu được khôi phục mặc dù tín hiệu
pilot bị mất do tác động của vật cản khi đầu cuối chuyển động.
4 Mô phỏng và đánh giá
4.1 Mô phỏng và đánh giá thuật toán tam giác với 3 tín hiệu pilot
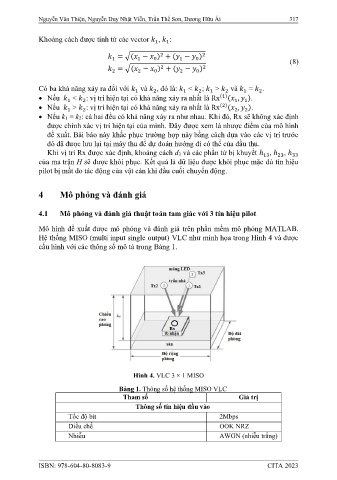
Mô hình đề xuất được mô phỏng và đánh giá trên phần mềm mô phỏng MATLAB.
Hệ thống MISO (multi input single output) VLC như minh họa trong Hình 4 và được
cấu hình với các thông số mô tả trong Bảng 1.
Hình 4. VLC 3 × 1 MISO
Bảng 1. Thông số hệ thống MISO VLC
Tham số Giá trị
Thông số tín hiệu đầu vào
Tốc độ bit 2Mbps
Điều chế OOK NRZ
Nhiễu AWGN (nhiễu trắng)
ISBN: 978-604-80-8083-9 CITA 2023