
Page 314 - Kỷ yếu hội thảo khoa học lần thứ 12 - Công nghệ thông tin và Ứng dụng trong các lĩnh vực (CITA 2023)
P. 314
298
B. Computation Time.
Computation time is the time taken by the algorithm to calculate the optimal path. A
shorter computation time indicates a faster algorithm.
3.2 Autonomous car Environment modeling
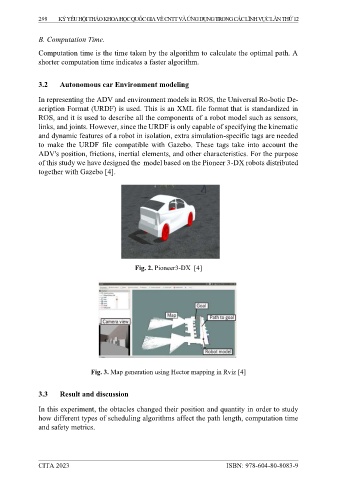
In representing the ADV and environment models in ROS, the Universal Ro-botic De-
scription Format (URDF) is used. This is an XML file format that is standardized in
ROS, and it is used to describe all the components of a robot model such as sensors,
links, and joints. However, since the URDF is only capable of specifying the kinematic
and dynamic features of a robot in isolation, extra simulation-specific tags are needed
to make the URDF file compatible with Gazebo. These tags take into account the
ADV's position, frictions, inertial elements, and other characteristics. For the purpose
of this study we have designed the model based on the Pioneer 3-DX robots distributed
together with Gazebo [4].
Fig. 2. Pioneer3-DX [4]
Fig. 3. Map generation using Hector mapping in Rviz [4]
3.3 Result and discussion
In this experiment, the obtacles changed their position and quantity in order to study
how different types of scheduling algorithms affect the path length, computation time
and safety metrics.
CITA 2023 ISBN: 978-604-80-8083-9